
阿波罗登月系列

上世纪60年代末,世代居住在地球上的人类借由火箭的力量第一次冲出地球摇篮,踏访了月球这个人类最熟悉的天体,在月球表面留下了人类活动的痕迹。这一幕无疑是人类历史上最浓墨重彩的一页。由于种种原因,迄今仍有一部分认识字的科盲坚决拒绝承认这一事实,他们坚持认为人类的登月行动是骗局,是美国政府或NASA故意伪造出来欺骗他们这些聪明人的。他们到处寻找NASA发布的照片和视频中的所谓“破绽”,一旦照片或者视频的内容与他们基于狭隘经验所理解的“常识”相抵触,他们就像发现了新大陆一样,到处宣扬。更有甚者,以所谓的“逻辑”来否定登月事实。例如有人宣称“失败是成功之母”,而阿波罗登月行动成功之前就没失败过,故登月不可能;有人则说阿波罗登月行动中的登月舱没事先进行无人试验登月,违反了他们心目中的“先无人再有人”神圣规律,所以必然是假的。
当然最可笑的还是网络大V李北方,他在头条文章里口口声声说阿波罗登月舱没法返回,还装模做样列了理由一二三四。被打脸后又碰瓷中科院官微(“中科院之声”),建议人家“认真地就美国人的登月做一次真正的科普,把过程讲清楚些”,声称“你们能把这些具体的细节讲清楚,就没有人‘质疑’登月了”。中科院官微没搭理他,他就兴高采烈宣告胜利了。
其实这样的科普书早就有了,我也贴出了资源链接,问题是他们根本不看。当然,也或者是他们看不懂,没关系,我这就给他们写一个浅显易懂、中学生都能看明白的科普文章。
话说1961年NASA拿到了时任美国总统约翰·F·肯尼迪的拨款承诺,开始正式实施日后将烧去几百亿美元的阿波罗计划,这个时候美国人连一次正儿八经的轨道飞行还没搞过。NASA面临的问题很多,但首要的问题是:阿波罗飞船应该怎么飞到月球并飞回来。NASA的科学家们各抒己见,很快形成了三个方案:
一,直接上升方案。就是用一枚超级火箭把载人登月飞船发射出去,令其到达月球表面,完成登陆任务后从月面起飞,返回地球。这个方案简单粗暴,直截了当,唯一的问题是:美国人能不能搞出这么大推力的火箭。
二,地球轨道交会方案。就是用两到三枚大型火箭把登月飞船分段发射到地球轨道上,然后令其在地球轨道上交会对接,之后这个组合体飞向月球并在月面着陆,再从月面起飞回到地球。这个方案对火箭的推力要求降低了很多,问题有两个:1,美国人当时还不知道怎么玩交会对接;2,搞一次探月需要发射好几枚火箭,成本太高;
三,月球轨道交会方案。这种方案是最后提出来的,就是用一枚大型火箭把登月飞船组合体送入月球轨道,然后宇航员驾驶组合体中的登月舱在月面着陆,之后从月面起飞并与在环月轨道上飞行的其他飞船舱段对接,由环月飞船带着宇航员脱离环月轨道回到地球。这个方案对火箭的推力要求最低,因为在这个方案里需要降落在月面上的登月舱质量很小,需要从月面返回的部分质量更小,这就大大减少了登月舱需要携带的推进剂的数量,也就大大减少了整个阿波罗飞船的质量,从而减少了对运载火箭推力的要求。只有一个问题:美国人需要在距离地面38万公里的地方玩一次交会对接。
NASA用了一年时间讨论这个问题,最终于1962年6月选择了月球轨道交会方案,因为这个方案虽然冒险,但是是唯一一个能够在肯尼迪要求的时限内完成登月计划的方案。此后NASA就开始按照这个方案来组织载人登月工程的实施(顺便说一句,我国的“嫦娥5号”登月项目的方案就是阿波罗方案的无人版)。
在某些人眼里,NASA在八年时间里什么都没干,突然就拿出录像带宣布把人送上月球表面了。事实当然不是这样。
NASA执行的第一个载人航天计划是“水星”计划,从1959年开始到1963年,共进行了20次不载人发射和6次载人发射(计划9次载人飞行,后3次取消了),实现把人送入地球轨道的目标。
与此同时,NASA又实施了三个无人探测月球计划:“徘徊者”(发射9颗,成功3颗)、“月球轨道”(发射5颗,成功5颗)和“勘测者”(发射7次,成功5次)。第一个系列是硬着陆器,就是探测器像石头一样砸到月面上,在快砸到月面之前用探测器上的摄像机拍月面,以获取着陆场附近高分辨率照片(我国嫦娥1号最终任务类似于此);第二个系列是绕月飞行的探测器,他们携带了高分辨率的照相机,获取全月面高分辨率照片(我国的嫦娥1号和2号的主要任务类似于此),以确定合适的登月着陆点;第三个系列是软着陆器,探测器像羽毛落地一样在月面着陆,主要目标是验证登月舱的四腿结构是否能在月面安全着陆(我国的嫦娥3号和4号即为软着陆器)。
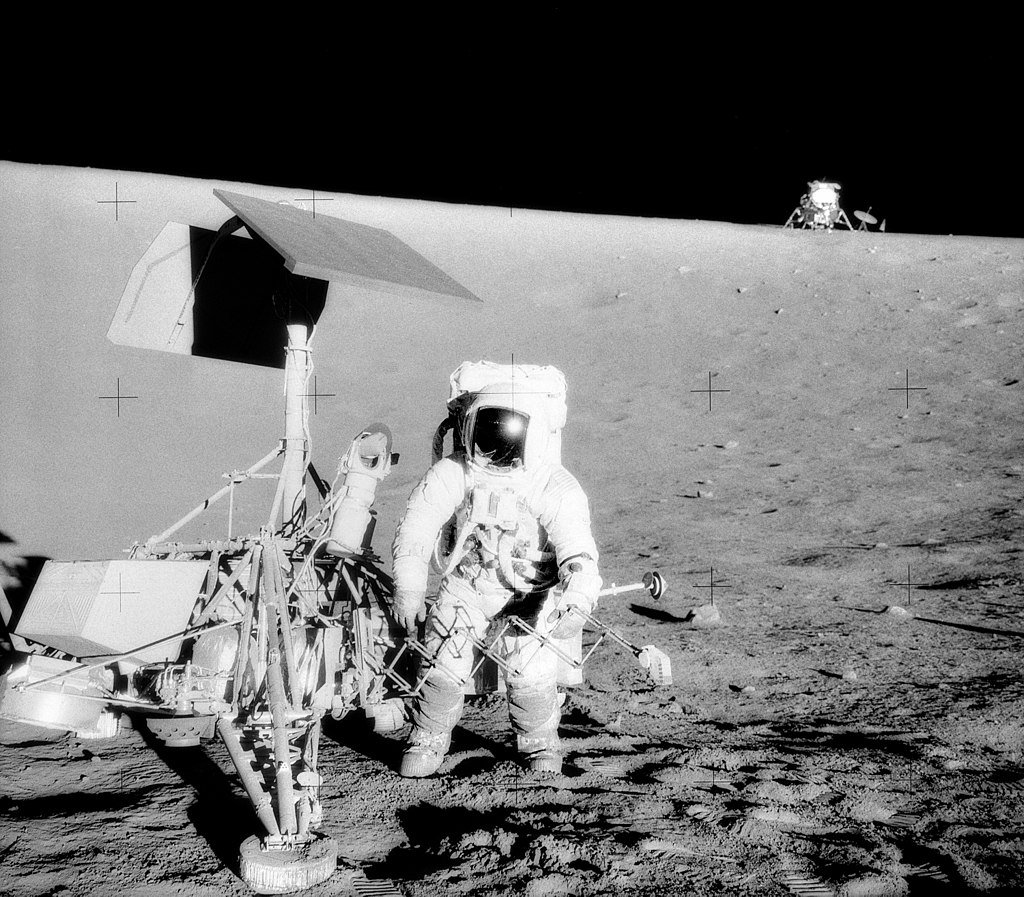
“勘测者”系列软着陆器中比较重要的是1号(1966年5月30日发射)和6号(1967年11月7日发射),前者试验了远程遥控摄像功能,并第一次通过电视广播信号直播了月面上的情况;后者在月面上成功软着陆7天后,按地面指令又点火2.5秒,从月面上起飞了4米,然后在原着陆点西侧2.5米处重新软着陆,从而成为第一颗在地外天体上起飞的探测器。此外还值得一提的是3号(1967年4月17日发射),它的着陆不是很成功,但31个月后,阿波罗12号降落在距离它不到300米的地方,宇航员们实地查看了勘测者3号登陆器,并取走了约10千克的登陆器上的部件(包括电视摄像机),带回地球,它也因此成为第一颗被人类在外空近距离探访的无人探测器。
从1965年开始,NASA通过“双子星座”计划,执行了10次载人飞行任务,用两年时间掌握了近地轨道飞行的基本技术,包括太空行走和近地轨道交会对接技术。执行阿波罗计划的第一批宇航员大部分都参与过“双子星座”计划,从而获得了宝贵的航天飞行经验。
NASA把整个阿波罗计划划分成几个相互衔接的任务,并用英文字母标注其顺序:A任务不载人,测试土星5号的能力和阿波罗飞船指令舱的再入能力;B任务用土星IB进行,搭载一个不载人的登月舱;C任务依然用土星IB进行,发射一个搭载了一名宇航员的指令勤务舱,测试其地球轨道飞行能力;D任务用土星5号进行,向地球轨道发射搭载3名宇航员的指令勤务舱;E任务将发射指令舱与登月舱的组合体,并在远离地球的地方测试其能力;F任务将是一次登月前的彩排,除了不实际登月,宇航员将实地执行全部机动变轨操作;G任务则是正式的登月行动,其目标就是两个字:登月。G任务之后,将是H任务、I任务,分别是让登月宇航员在月球上漫步两次以及让指令舱在轨运行一个月以测绘月球表面;最后又提出了J任务,就是让宇航员在月面上停留3天,并携带月球车以扩大考察范围。
从1967年开始,NASA以平均两、三个月发射一次的频率执行“阿波罗”计划:
1967年11月9日 阿波罗4号 A任务;
1968年1月22日 阿波罗5号 B任务,由于测试很成功,第二次B任务取消;
1968年4月4日 阿波罗6号 A任务,测试中发现了土星5号的设计缺陷;
1968年10月11日 阿波罗7号 C任务;
1968年12月21日 阿波罗8号 原定执行D任务,但由于登月舱延期交付,故NASA把E任务的一部分提前,即把指令勤务舱送入环月轨道,命名为C‘任务,我国的嫦娥5号T1飞行试验器的任务与此类似;
1969年3月3日 阿波罗9号 D任务,阿波罗组合体进入绕日轨道,宇航员从指令勤务舱进入登月舱,在绕日轨道上模拟了月球轨道上交会对接操作;
1969年5月18日 阿波罗10号 F任务,宇航员在环月轨道上练习了交会对接操作;
1969年7月16日 阿波罗11号 G任务。
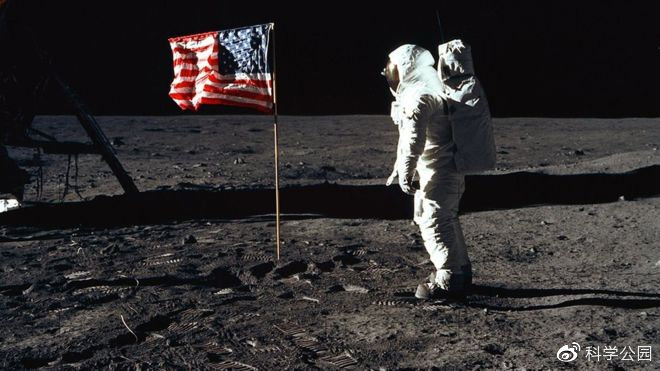
7月20日16时17分43秒(美国东部夏令时),宇航员尼尔·阿姆斯特朗和巴兹·奥尔德林驾驶“鹰”号登月舱在月面静海成功着陆。与此同时,苏联的月球15号探测器正在月球轨道上徘徊,准备软着陆,7月21日11时51分(美国东部夏令时),它几乎是在美国人的眼皮底下坠毁在月面危海一角,仓促结束了它的使命,而这个时候,美国宇航员正在为13时54分离开月面而忙碌。
和很多人想象的不同,登月宇航员并不是直接从月面上返回地球,原因有两个:第一,他们携带的推进剂数量(只有2吨多)不足以让他们从月面进入返回地球的轨道;第二,登月舱在设计时只能用在地球大气层以外,完全没有再入地球大气层所必须的保护装置。他们需要做的是在正确的时间从月面起飞,与在头顶110千米上空飞过的阿波罗指令勤务舱对接,然后进入指令勤务舱,由指令勤务舱开动其主发动机将三名宇航员带回地球。
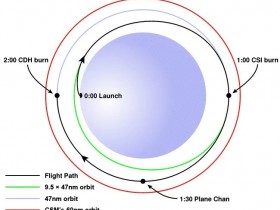
NASA最初设想的月球轨道交会对接方案被称作直接上升法,就是登月舱上升级从月面起飞后,直接进入一条与阿波罗指令勤务舱交会的弹道。这个方法容易理解,但太过冒险,一旦登月舱错过与指令勤务舱的对接,很容易重新落回月面,到那时就是神仙也没有办法拯救登月宇航员了。所以NASA根据执行双子星座计划时获得的经验,提出了渐进的共椭圆交会法,其步骤如下:
1,指令舱首先变轨机动,进入能够经过登月舱上空的圆轨道;
2,指令舱即将飞过登月舱上空时,登月舱上升级主发动机点火,7分钟后进入近月点17千米,远月点84千米的椭圆轨道;
3,登月舱上升级到达其远月点后,姿态控制发动机点火,进入圆轨道,并开始跟踪指令勤务舱;
4,再过半圈之后,登月舱上升级姿控发动机点火,将登月舱送入指令勤务舱下方28千米的轨道上;
5,40分钟的滑行飞行阶段,地面控制中心、登月舱上的宇航员和指令舱中的宇航员将同时计算并相互校核,最终确定合适的登月舱发动机点火参数;
6,登月舱上升级再次点火,将登月舱上升级送入与能与指令舱对接的转移轨道,两个航天器相遇;
7,登月舱上升级反复制动点火,令其与指令舱之间相对速度为0,相对距离为0,之后完成对接操作。

共椭圆交会第一圈
按这个方案,需要两个航天器共同绕月亮转2圈,总计花费约4个小时时间才能完成。阿波罗10,11,12都采用了这个办法,结果宇航员们精疲力尽,所以当阿波罗计划因为阿波罗13号的事故而陷入停顿的时候,宇航员们在模拟器上反复试验,提出了一个新的方案:直接交会(又称快速交会)。从阿波罗14号开始,宇航员们都采用直接交会方法实现了登月舱与指令舱的交会对接,这只需要两个航天器绕月亮飞行一圈,时间也减少了2个小时。
一切都从指令舱最后一次经过登月舱上空开始,此时登月舱上的交会雷达会尝试和指令舱上的应答机通讯,向登月舱内的宇航员提供目标飞行器的距离、距离变化率和方向,同时指令舱上的宇航员用28倍的六分仪观察月面上的登月舱,帮助地面飞行控制中心确定登月舱的状态矢量。登月舱内的宇航员抛掉一切不需要带回地球的物品,然后把要携带的物品按照计划放置在登月舱舱内的特定位置,尽量保持上升级的重心在理想重心附近,以避免过多消耗姿控发动机的推进剂。
接着,地面上的飞行控制中心向登月舱内的宇航员和指令舱内的宇航员分别报读起飞用的PAD(Pre-Advisory Data),宇航员复述这些数据,并将这些数据输入各自的机载计算机。阿波罗11号登月时,指令长阿姆斯特朗听到的月面起飞PAD是这样的:
伊文思(地面飞控人员):好的。登月舱上升级Pad:TIG(起飞时刻),124:22:00:00;名词 76,55349,00322,+0017;DEDA 47,+37104,-70470,+58604,+56936。你们的登月舱重量 10837(单位是英磅,约合4915.58千克)。你们的T14(下一个起飞窗口时间)是126,+20,+12。结束。
有了这些点火数据,机载计算机就能控制登月舱上升级发动机的燃烧时间,在登月舱上升级上安装的加速度计达到指定速度增量的时候关闭发动机,从而把登月舱上升级送入预定的轨道。在阿波罗计划的时代,地面飞控人员并不直接控制载人飞船,他们扮演的角色类似于航空系统的空管人员,向宇航员提供飞行建议和数据,对飞船的控制由宇航员通过机载计算机完成,或者手动完成。有些人质疑在有通信延迟的情况下地面如何对飞船进行实时控制,答案很简单:不存在这种来自地面的实时控制,飞船是由宇航员控制的。
在进行发射清单检查的时候,宇航员需要穿戴好头盔和手套,以避免上升级发动机点火时可能引发的冲击波对登月舱上升级的影响。离起飞还有几分钟的时候,宇航员开始进行最后的检查。起飞前30秒,指令长阿姆斯特朗打开了点火保险,起飞前20秒,奥尔德林注意到显示器突然空白,这意味着船载导航计算机开始工作。接着奥尔德林开始倒计时:9,8,7,6,5。然后他按下了“异常终止级”按钮,登月舱上升级和下降级之间的4个连接点被火工品炸断,同时一把设计精巧的剪刀割断了连接上升级和下降级之间一束电缆和管子,接着他又按下了“发动机解除保险”按钮,从而允许船载计算机自动启动登月舱主发动机。随后,登月舱上升级发动机点火,在主发动机15.6千牛推力作用下,登月舱上升级开始起飞。
从阿波罗15号任务开始,登月舱下降级上携带了一部电动月球漫游车(LRV),在月球车上安装了一部由地面遥控的摄像机,当月球车静止时,摄像机拍摄的画面可以通过月球车上安装的定向天线传输到地面,由位于澳大利亚新南威尔士州的一面直径64米的抛物面天线接收后转播到全世界。在宇航员进入登月舱准备返回前,他们需要把月球车停放在登月舱以东约100米的地方(从地面看是登月舱以西),让月球车上的电视摄像机对准登月舱方向。负责遥控摄像机的人是休斯顿航天中心的操作员艾德·芬德尔(Ed Fendell),从他发出摄像机倾斜指令到从监视器上看到结果有约3秒的延迟,由于种种原因阿波罗15和16号登月舱起飞的画面他没来得及追踪上,登月舱几秒钟后就飞出了摄像机的视野,这个缺憾是在阿波罗17号任务上弥补的。
通过电视画面可以看到登月舱下降级垂直起飞后不到10秒就开始转弯,在这之前姿控发动机在空中努力把登月舱的指向调整到发射方位(在降落时下降级不可能停到完全水平的位置上,所以坐在下降级上的登月舱上升级也不可能完全竖直向上,登月舱轴线和铅垂线之间的偏差在起飞前由宇航员用仪器精确测量,并报告给地面控制人员,并输入船载导航计算机),登月舱上升级头部迅速向下倾斜50°多一些,然后在主发动机的推动下开始水平加速。此外,由于月面上没有大气,通过阿波罗15号登月舱起飞的电视直播画面可以看到,被登月舱上升级发动机所喷出的羽流吹起来的月尘在1/6g的重力加速度作用下干净利落的回落在月球表面,原本被四散飞舞的月尘包裹着的登月舱下降级很快就又露出了真容。这是地球上的摄影棚内根本无法做到的。
宇航员在起飞过程中时刻关注着登月舱的高度和速度,同时船载计算机也在监控着这些数据,一旦它确定上升级达到了足够的速度(上文提到的PAD就做这个用途,它提供的鹰号登月舱上升级发动机关机条件是速度达到5693.6英尺/秒,也就是约1.7千米/秒)就关闭主发动机。阿波罗11号在起飞后7分17秒关闭了发动机,宇航员向地面报告此时他们的速度是水平5337.3英尺/秒、竖直32.8英尺/秒,高度是60,666英尺(18.5千米),1分40秒后,机载计算机算出他们的轨道是远月点47.3海里(87.6千米)X近月点9.5海里(17.6千米)椭圆轨道,登月舱成功从月面起飞入轨。
然后阿波罗11号开始按照既定规程圆化其轨道,这时他们的总质量是2,669千克,7分钟的多起飞过程已经用去了2.247吨推进剂(航空肼50+四氧化二氮),此时鹰号登月舱上的两名宇航员和哥伦比亚号指令勤务舱上的一名宇航员开始通过VHF系统频繁通话,因为这时两个航天器已经进入月球背向地球的一面,地面与他们的通信已经中断,他们只能彼此依靠了。鹰号登月舱的姿控发动机工作51秒后,进入圆轨道,哥伦比亚号上的宇航员测出登月舱的轨道为91.7X85.4千米的近圆轨道并告知了鹰号上的宇航员。与地面的通信恢复之后,在起飞2小时的时候,鹰号登月舱进行了CDH点火,完成了上文提到的步骤4,进入与哥伦比亚号保持28千米高度差的轨道。
40分钟的共同飞行之后,鹰号进行TPI点火,开始与哥伦比亚号的交会对接(很快就进入与地面的通信盲区了)。三名宇航员通过VHF系统密集沟通,鹰号登月舱进行了两次中途轨道修正,两个航天器的高度差逐渐缩短,TPI点火33分钟后,鹰号登月舱开始制动(否则就会从哥伦比亚号前面飞过去),从哥伦比亚号上宇航员柯林斯用哈苏像机拍到的画面上看,鹰号从下方一点一点接近。就在两个航天器即将接触的时候,意料之外的情况发生了。

柯林斯用哈苏相机拍到的画面1

柯林斯用哈苏相机拍到的画面2

柯林斯用哈苏相机拍到的画面3

柯林斯用哈苏相机拍到的画面4
阿姆斯特朗发现如果他按照规程将登月舱头部向下压90度再绕轴线旋转60度,则登月舱头部下压时刺眼的阳光正好通过舷窗射入,所以他决定改变规程,先转动60度,再下压登月舱头部,这是一种从来没有训练过的操作,结果导致船载主导航设备处于万向架锁定状态。阿姆斯特朗当机立断,用辅助导航设备完成了对接。但辅助导航设备非常敏感,当柯林斯操纵对接探头将登月舱拉近指令勤务舱时,辅助导航设备误以为登月舱状态发生了变化,于是启动姿控发动机准备“纠正”,登月舱开始扭动,但8秒钟后登月舱和质量大得多的指令舱硬连接成功,登月舱终于放弃了抵抗。
这个小插曲让阿姆斯特朗后来做了好几次检讨。其他的宇航员汲取了他的教训,此后的登月舱与指令舱交会对接活动中没有出现类似的情况。
登月舱与指令舱对接成功后,两边的宇航员检查连接通道的气密性,并开始加压,之后打开登月舱一侧的舱门。登月舱内的宇航员开始执行净化程序,设法除去沾染在他们宇航服上的月尘。完成净化后,宇航员们把登月舱内需要带回地球的物品搬入指令勤务舱指定的位置,不用的物资留在登月舱内,之后将登月舱丢弃。
阿波罗11号丢弃鹰号登月舱的时刻是它在月面上点火起飞后的第5小时47分钟,登月舱后来以每小时6000千米的速度坠毁在月面上,激起的月震波被安装在月面上的月震仪记录并发回地球。
宇航员们在指令勤务舱内汇合后,开始着手返回地球的旅程。和在月面上起飞一样,宇航员们首先要从地面飞控人员那里获取进入月地转移轨道的PAD数据。奥尔德林听到的PAD是这样的:
杜克(地面飞控人员):好的。来了:TEI-30, SPS/G&N:36691; -0.61, +0.67; 135:23:41.49。 名词 81,+3202.0, +0671.3, -0277.3; 181, 054, 013。名词 44, 远地点 不适用, +0023.0; 3283.3, 2:28。Delta-VC, 3262.5; 24,151.0 35.5。接下来三行不适用。名词 61,+11.03,-172.37; 1180.6, 36275, 195:04:52。你们的定位星是天津四和织女一, 242, 172, 012。我们希望两个推进器沉底16秒。Tig-2分钟时,地平线在11°线上,补充一点:你们的六分仪恒星在134:50后可见。准备好回读。结束。
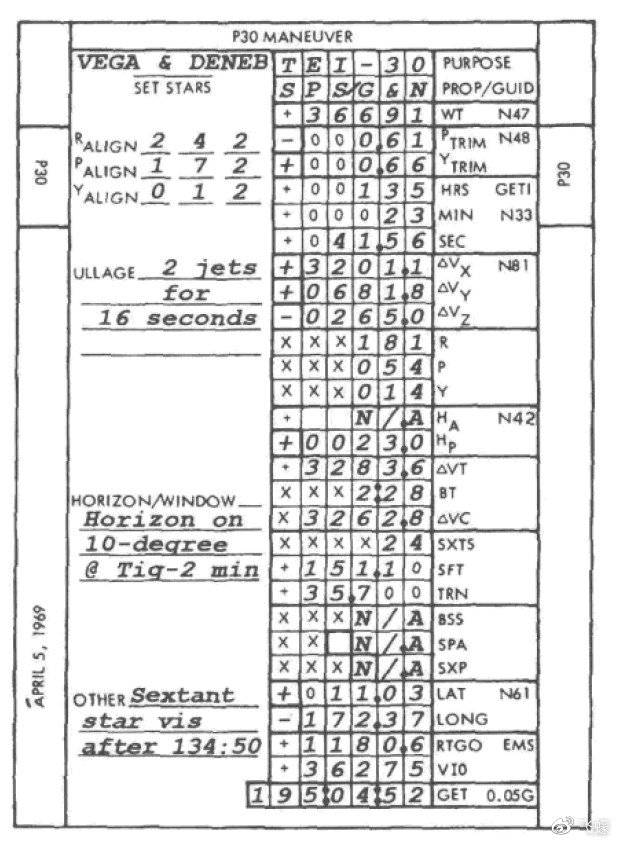
PAD实例
从这些PAD数据中我们可以解读出的信息是,此刻指令舱总质量16,643 千克,点火时刻为135:23:41.49,使用指令舱主发动机,总点火时间2分28秒,点火后指令舱速度要增加1,000.7米/秒,之后进入近地点为42.6千米的一个椭圆轨道。众所周知,距离地球42.6千米的地方位于地球大气层内,也就是飞船将再入大气层。进入大气层时刻预计为195:04:52,之后飞船将飞行2186.4千米,初始速度为约11千米/秒,降落地点为北纬11.03°西经172.37°(太平洋中部)。
指令舱主发动机点火时指令舱位于月球背面,速度为1,633米/秒,在点火时刻到来之前,宇航员们按照点火清单,一项一项操作。倒计时35秒时,柯林斯注意到制导系统开始工作,15秒时计算机显示屏上开始闪烁“99”,请求点燃发动机,指令长阿姆斯特朗予以确认,然后开始执行储箱沉底操作,飞船被稍向前推进,使处于失重状态的推进剂被推入储箱底部。预定点火时刻到来时,主发动机准时点火。不过由于发动机推力与地面控制中心预估的不一致,发动机在点火2分28秒后并未自动关闭,而是又多烧了3.4秒,最后是柯林斯和计算机同时关闭了发动机。但结果很不错,飞船增速1000.6米/秒,误差只有5厘米/秒,完美进入月地转移轨道,开始了返回地球的三天旅程。
离开地球的时候,指令勤务舱内存储着18.5吨推进剂,在此次点火之后已经所剩无几了。阿波罗11号任务时,还剩1/8,而到了阿波罗17号时,只剩了4%,不过从月球返回地球的途中已经基本上不再需要发动机点火了,就好像他们是从38万千米之外的地方掉回地面一样。这段时间是宇航员最轻松的时候,因为登月目的已经达到,大部分危险已经度过,只要指令勤务舱良好运转,安全返回是有足够保障的。值得指出的是,返回的时候指令舱驾驶员(对应于阿波罗11号就是柯林斯)负责导航,他负责定期对准制导平台,并维持飞船的自主导航能力,以便在失去与地面通信的情况下依然能够引导飞船准确再入并溅落。他不断测量月球或地球与指定恒星的夹角,并通过船载计算机上的P23计算出飞船的位置、轨道和接触地球大气时的夹角。这个夹角的理想值是6.5°±0.5°,如果角度过大,飞船将会在大气层内烧毁,如果角度过小,飞船将会被大气层弹出(就像用石片或者瓦片在水面上打水漂一样)而返回宇宙空间,无论那种结果,都将是灾难性的。最终阿波罗11号再入大气层时的夹角为6.48°。
在着陆前4个小时,飞船上的宇航员们开始接收最后一张PAD,用来确定飞船的再入参数。人们并不知道飞船在什么时候开始接触地球大气层,不过飞船接触地球大气后会减速,所以NASA简单的规定以空气阻力对飞船开始产生0.05g的加速度这一事件作为飞船接触地球大气的标志,这时两件事将产生:1,计算机开始控制再入飞行;2,再入监视系统开始监控飞行路径的进展。在此之前,宇航员们要做好准备,首先是切断勤务舱的电源,并打开VHF通信系统,他们还需要穿好救生衣。宇航员需要检查飞船的姿态,并确保飞船各系统工作正常。再入前25分钟,宇航员们开始准备丢弃勤务舱,一切正常后由计算机执行程序P62丢弃勤务舱。之后计算机控制飞船调整姿态,使宇航员处于脚朝上头朝下的姿势,以这种姿态开始进入如今人所共知的“黑障”区。
飞船以高速冲入大气层后,飞船底部隔热层的前面产生了强大的冲击波,把气体瞬间加热到等离子态,从而围绕着飞船形成一个等离子鞘套,这就妨碍了飞船与地面的无线电通信,时间长达3分钟多。在这期间地面与飞船之间的通信断绝,所以被称作“黑障”。在这个阶段宇航员们承受了6g(峰值6.5g)的加速度,他们通过舷窗看到了包裹着飞船的炽热气体产生的辉光。

进入之后9分钟左右,阿姆斯特朗回应了地面的通话请求,他报告了飞船的坐标:北纬13.32°,西经167.17°,20秒后他又报告了他的新坐标:北纬13.30°,西经169.15°。此刻他们的海拔高度是大约3千米,飞船主降落伞开始打开。主降落伞一共三面,每面直径25米,NASA将其设计为即使只有两面打开也能保证飞船安全降落,在正常情况下,飞船降落速度被进一步减缓到8.5米/秒。1969年7月24日12:50:35(美国东部夏令时),阿波罗11号飞船安全降落在太平洋中部地区,距离搜救他们的大黄蜂号航空母舰约24千米,1小时后,搜寻人员发现了他们。
类似的溅落日后又进行了6次。其中阿波罗12号的溅落最惊险,由于种种原因,飞船重重地砸在海面上,一架未固定好的16毫米摄影机掉了下来,砸在宇航员艾伦·比恩的头上,一下子把他砸晕了,血流了出来,其他宇航员差点儿以为他被砸死了。事后艾伦头上缝了6针。
阿波罗飞船就是这样回到地球的。
下一个用类似方式回到地球的将是我国的嫦娥5号,让我们拭目以待。

(完)



您可以选择一种方式赞助本站
赏