
一般人不知道的是,月球轨道交会对接其实是阿波罗计划和嫦娥5号任务的最核心的一步。月面着陆和起飞当然也很重要,但这些环节体现不出阿波罗计划和嫦娥五号任务的特色和精髓,因此怎么强调“月轨交会对接”的重要性都不过分。
那么月轨交会对接技术是不是像一些质疑家们所说的那样“没有卫星电脑组合控制,即使是现在人类也无法实现月球轨道靠人工驾驶两个航天器进行对接”“50年前美国没有月轨无人对接技术,却能靠宇航员驾驶实现月轨对接,信这个的人脑子里装的肯定是豆腐脑”?
当然不是,例如有网友就很机智的讽刺道:“没有发明自动驾驶技术前,人类无法开车”。
这位质疑家无言以对,只好东拉西扯:“(那你们)说说在没有卫星电脑精准导航的条件下,两个航天器如何靠纯人工在月球轨道上对接?”
首先要指出的是,无论是阿波罗飞船和嫦娥5号,在月轨上都用不了卫星导航,因为无论是GPS还是北斗,它们发出的导航信号都只适用于地球附近,这些信号传播到月球轨道距离上已经非常微弱了,因此根本没法用它们来定位导航。事实上对月轨上的飞行器的定轨测量和计算都是依赖地面上的深空测控网来实现的,精度可以达到几十米。这个精度用来指挥对接是远远不够的,但可以用来指挥航天器进行空间交会。
下面我就说一下这个月轨交会对接是怎么在“没有卫星导航”的情况下实现的。首先需要介绍一点轨道力学基础。
有三个原理需要牢牢记住:
①高轨道上物体的运动周期比低轨道上的物体运动周期更长,线速度也更慢(开普勒第三定律)。
因此飞行器A追赶飞行器B的方法就是当A的轨道高度高于B时,可以先让B跑到自己的前面,然后用反向点火的方式,降低自己的轨道高度并加速,从而追上B;而当A的轨道高度低于B时,则可以让自己跑到B的前面,然后点火,抬高自己的轨道高度并减速,从而与B相遇。
②从一个轨道转移到另一个轨道时的最佳转移方式是霍曼转移轨道,即第一次点火把自己送到一个以原轨道高度为近点以目标轨道高度为远点的大椭圆轨道,到达远点后再点一次火,把自己送入目标轨道。
③从一个轨道面变轨到另一个轨道面的最高效方式是在两个轨道面的交点处点火。力学计算表明,轨道面变轨是非常消耗推进剂的。因此,携带推进剂较少的航天器应该尽量避免调整自己的轨道面。
从这些原理可以知道,所谓交会对接,无非就是两个航天器在合适的时间进行发动机点火,改变它们的轨道,令它们能够在同一时间以相同的速度出现在空间中的同一个位置。因此可以按照点火的时刻把整个交会对接过程划分成几个阶段。
①在阿波罗飞船中携带推进剂较多的是指令/勤务舱,在嫦娥5号中则是轨返组合体,因此月轨交会对接的第一步是指令/勤务舱或轨返组合体主动变轨,把自己的轨道面改成便于上升级/上升器交会的轨道面。在阿波罗飞船上,点火操作是指令舱驾驶员按照地面指令设置并交给飞船上的计算机执行的。
飞船和探测器在距离地面38万千米左右的地方飞行,由于信号传输需要时间,因此有人质疑阿波罗计划执行时地面怎么能够控制飞船上的火箭点火时间,毕竟飞船每秒钟就会跑出几千米远,等地面的点火指令到达,飞船偏离发指令时的位置已经很远了。解决这个问题的办法非常简单(而且嫦娥各次任务也是类似的执行机制):在指令里指定火箭发动机执行指令的时刻,给飞船留出执行指令的时间。
具体讲就是地面先根据飞船/探测器当前的运动状态,计算接下来某个时刻(T0)它的位置、速度和姿态,然后算出在T0时刻它需要执行的点火数据(发动机工作时间、喷口方向等),然后在T0时刻之前几分钟或者十几分钟时把点火数据提前发送到飞船/探测器上,飞船上的宇航员把数据输入导航计算机(探测器则是直接注入点火指令),这样T0时刻一到,计算机就自动操控火箭发动机执行相应的命令了。
从上述介绍可以看出,地面对火箭的控制并不是实时生效的,因此它只能引导两个航天器在月球轨道交会,而无法引导它们对接,轨道对接工作只能依赖飞船/探测器上的宇航员或导航计算机自主完成。
在阿波罗时代,飞船上的计算机能力很弱,还不足以实现自主交会对接,因此必须靠宇航员人工操作来完成交会对接过程。质疑家质疑阿波罗计划没有先试验无人交会对接就试验人工交会对接,违反了他们心目中的“科学规律”。这当然是荒谬的,实际上无人交会对接技术难度要远远高于人工交会对接,美国人要是在那个时候先搞无人交会对接才是脑子进了水。
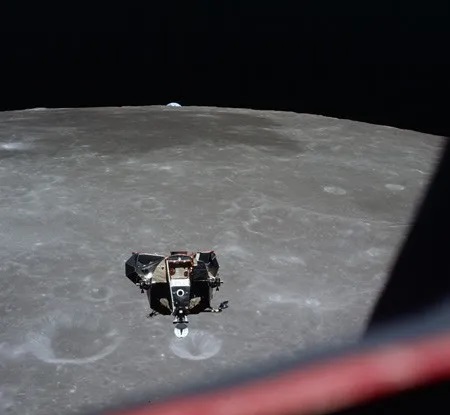
②阿波罗计划中指令舱变轨之后就是地面控制中心根据指令舱的轨道参数,计算出登月舱上升级的发射窗口时间,并把发射需要的数据报给登月舱上升级内的宇航员,由他们输入导航计算机。当预定的点火时刻来临时,计算机控制上升级点火起飞,把宇航员和月面采样样品带入一个近月点17千米左右,远月点84千米左右的绕月椭圆轨道。
③在远月点处,上升级会再次点火(CSI点火),把他们的轨道圆化,必要时进行CDH点火使上升级始终位于比指令/勤务舱低28千米的轨道上。
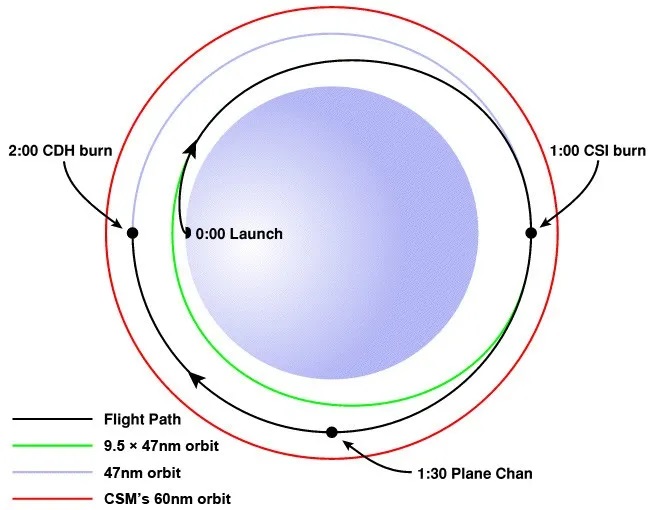
登月舱起飞后绕月第一圈
当然,这些是理论上的规划值,实际上飞船的轨道往往会与理论轨道有一定的偏差,例如阿波罗11号登月舱“鹰”号的上升级进入的初始轨道是近月点17.6千米、远月点87.6千米的椭圆轨道,圆化之后是85千米X92.5千米,而当时指令舱“哥伦比亚”号的轨道是104.8千米 X 115.8千米,二者相距169.1千米。此时,“鹰”号正好绕月飞行一周。
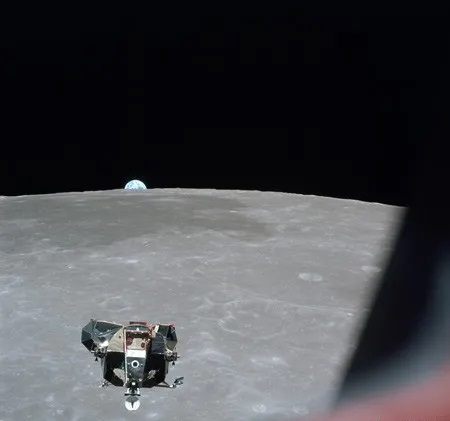
登月舱起飞后绕月第二圈
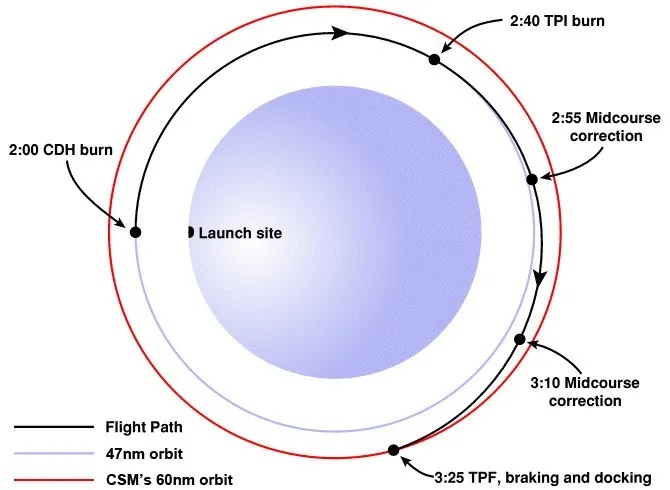
④接下来的40分钟内,地面会进一步跟踪并计算上升级进入转移轨道的点火数据,这些参数同样是由宇航员输入导航计算机并由导航计算机自动控制发动机。在预定时刻计算机操控发动机实施所谓TPI点火,把上升级送入转移轨道,这个轨道的理论远月点略高于指令/勤务舱的轨道高度,上升级从这个点开始绕月飞行大约130°。
在这个转移过程中,从上升级上看指令/勤务舱,理论计算表明它相对于恒星背景的位置应该是固定的,因此上升级上的宇航员在交会的最后阶段(大约相距1.3千米开始,此时相对速度约9.5米/秒)可以通过目视观测来确定自己的飞行轨迹有多大的偏差,并操纵RCS发动机反复点火进行修正,最终进入指令勤务舱的轨道并使自己与指令/勤务舱精确地靠在一起,从而完成交会工作。

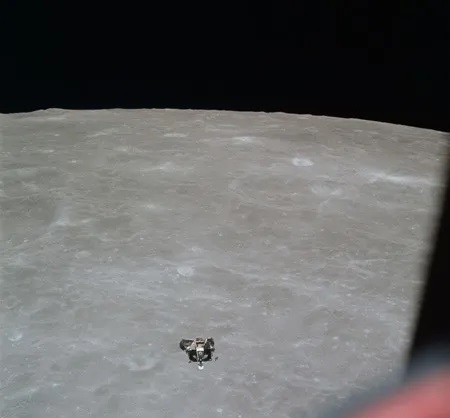
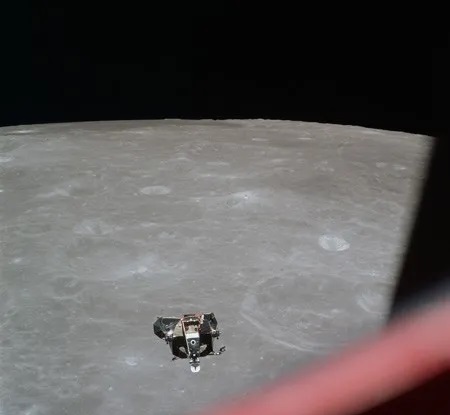
柯林斯在交会对接最后阶段用相机拍到的画面
从上面的简单介绍中可以看出,整个交会过程中最重要的就是TPI点火,即登月舱上升级开始从84千米圆轨道上升到112千米圆轨道的那个时刻。TPI点火时刻通常是在登月舱位于月球背对地球的那一面时,此时与地面的通信是中断的,因此在此之后宇航员们必须密切配合,依靠他们的交会雷达、六分仪等电子和光学设备定期测量彼此之间的相对距离、接近速率以及接近角度,并利用RCS发动机进行修正。
此外NASA还考虑到一旦船载制导系统(PGNS和AGS)都失灵的情况下宇航员应该有一个应急方案,因此事先计算并准备好一组图表,当飞船上的制导系统都出现故障的情况下,宇航员可以利用光学仪器、雷达和计时器测量彼此距离、距离变化率、角度和时间,然后在图表上画出一条曲线,与理论计算出的曲线进行比较,从而导出可用的TPI点火方案,最终可以安全地与指令勤务舱交会。为此宇航员们在从地面上出发前都进行了相关的大量训练。当然,这种极端情况从来没有出现过。
公开资料显示,嫦娥5号的月轨交会对接过程与阿波罗较为相似,重要的差别是,嫦娥5号利用携带推进剂较多的轨返组合体主动实施最后的轨道机动,这相当于阿波罗计划中的救援模式(指令舱实施变轨与登月舱上升级对接);另外一个重要差别是嫦娥5号的两个航天器的交会轨道高度是距月面200千米左右,比阿波罗计划中的交会轨道高度高了差不多100千米。
新华社发布的交会对接最终逼近阶段画面
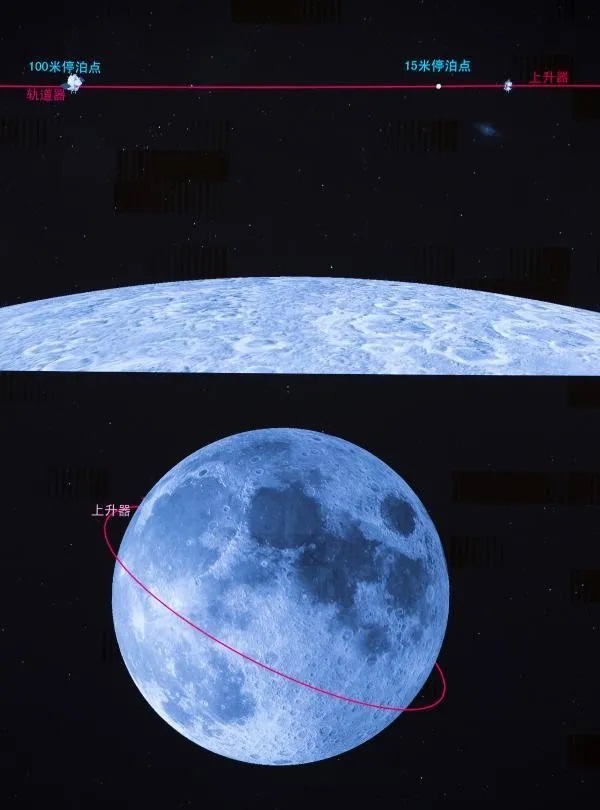
地面首先引导上升器进入15千米X180千米的绕月椭圆轨道,然后圆化其轨道,并引导两器进入相互能够探测的距离(约100千米) ,此时两器上安装的高精度微波雷达(主机在轨返组合体上,应答机在上升器上)开始工作,提供彼此的距离、方位、相对速度等数据,并进行双向空空通信。两器根据雷达提供信号调整飞行姿态,通过近程导引(把彼此距离缩至1000米,在这个过程中开始使用激光雷达)、最终逼近(距离缩至100米)两个阶段,最终使轨道器上的对接机构捕获、锁定上升器。
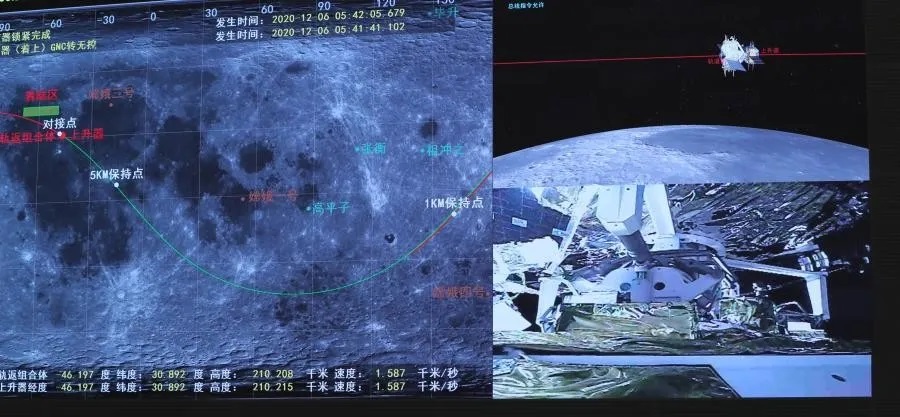
新华社发布的两器成功捕获画面
公开资料也显示,嫦娥5号的这些轨道控制方案是在嫦娥5号T1再入返回飞行试验器服务舱2015年年初的模拟试验基础上形成和完善的。
之所以说嫦娥5号的技术难度和水平比阿波罗飞船高,就是因为这些复杂的轨道控制操作大部分是由轨返组合体和上升器利用微波雷达、激光雷达和器上负责制导的计算机自主完成的,无需地面干预和参与,尤其是对接的时候,两器位置相对误差控制到不到5厘米,显示出中国在人工智能和雷达技术方面的巨大优势。
中国突破了月球轨道无人交会对接技术难关之后,未来的火星无人采样返回任务已经没有大的技术障碍了。




您可以选择一种方式赞助本站
赏